
机器人
IR-S7系列SCARA机器人
IR-R10桌面型&R10H&R11系列机器人
IR-R16&R25系列六关节机器人
IR-R20系列六关节机器人
IR-R10落地型系列六关节机器人
IR-R4H(中空手腕)六关节机器人
伺服驱动器
SV660F系列高性能Profinet总线型伺服
SV660系列伺服驱动器
SV670系列标准型伺服驱动器
SV680L系列高性能直驱系列伺服
SV680系列旗舰型伺服驱动器
SV630经济型伺服驱动器
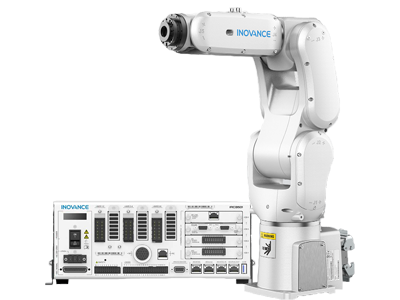
- IR-R4H(中空手腕)
六关节机器人R4H 系列六关节机器人采用中空手腕结构设计,内置线缆,有序收纳,减少干涉,具备结构紧凑、高灵活性、高节拍等优势,高效易用,满足客户搬运、装配,涂胶等场景多元需求,助力高效率作业。应用行业主要分布在3C 行业中的搬运与上下料应用、光伏行业的搬运应用;同时考虑兼容产品在装配和涂胶的场景应用需求。
参数与性能
产品特点
| 负载 | 4kg |
| 臂长 | 545.7mm |
| 重复定位精度 | ±0.02mm |
| 防护等级 | 标配IP40,选配IP67 |
规格参数
| 项目 | IR-R4H-54S5 | |
| 结构形式 | 结构形式 | 垂直多关节串联结构 |
| 轴数 | 轴数 | 6轴 |
| 最大运动半径 | 最大运动半径 | 545.7mm |
| 重复定位精度 | 重复定位精度 | ±0.02mm |
| 腕部最大负载 | 腕部最大负载 | 4kg |
| 防护等级 | 防护等级 | 标配IP40,选配IP67 |
| 最大运动速度 | J1轴 | 450°/s |
| J2轴 | 460°/s | |
| J3轴 | 520°/s | |
| J4轴 | 560°/s | |
| J5轴 | 560°/s | |
| J6轴 | 900°/s | |
| 最大运动范围 | J1轴 | ±170° |
| J2轴 | -120°~+110° | |
| J3轴 | -65°~+195° | |
| J4轴 | ±190° | |
| J5轴 | ±120° | |
| J6轴 | ±360° | |
| 腕部允许负载转矩 | J4轴 | 8.86N•m |
| J5轴 | 8.86N•m | |
| J6轴 | 4.9N•m | |
| 腕部允许负载惯量 | J4轴 | 0.2kg•m2 |
| J5轴 | 0.2kg•m2 | |
| J6轴 | 0.067kg•m2 | |
| 用户接口 | 配线 | 12路信号30V 0.5A |
| 气路 | 气管:∅4mm×4 耐压:0.59MPa | |
| 环境条件 | 环境温度 | 0℃~45℃ |
| 环境湿度 | 5%RH~95%RH(无凝露) | |
| 最大温度梯度 | 1.5℃/min | |
| 本体重量 | 本体重量 | 24.5kg |
| 输入电源功率(平均功耗) | 输入电源功率(平均功耗) | 2kVA(0.5kW) |
| 适用控制柜 | 适用控制柜(标配) | IRCB500-6LD IRCB501-6LD |
| 安装方式 | 安装方式 | 落地安装 |
| 噪声等级 | 噪声级 | LAeq≤80dB |
| 底座安装尺寸 | 底座安装尺寸 | 138mm×138mm(4×∅11mm) |
联系我们
如果您有业务洽谈上的需要,请随时与我们联系
如果您有业务洽谈上的需要,请随时与我们联系
0755-2774 5002
188 1688 2866
zoupinde@robogood.cn
深圳市龙华区大浪街道新石社区华宁路117号中安科技园A栋902





